Carlo Bosio
Hi, I am Carlo! I am a PhD student at UC Berkeley advised by Mark W. Mueller within the HiPeRLab, and affiliated with the Berkeley AI Research Lab. My research lies at the intersection of Robotics, Controls, Machine Learning, and Computational Design.
In summer 2025, I interned at Zoox in the Prediction and Behavior ML division, and worked on Reinforcement Learning for agent prioritization in autonomous driving.
Before coming to Berkeley, I obtained an MS with honors in Robotics from Sant'Anna School of Advanced Studies and the University of Pisa, Italy. I have also had the pleasure of spending time at EPFL (Switzerland), Stanford University (USA), and TBSI (China).
Feel free to reach out if you have any questions or would like to have a chat!
Email |
Google Scholar |
CV |
Resume |
LinkedIn
|

|
News
- [May 2026] I am going to be at ACC 2026 in New Orleans presenting this paper on LLMs, control, and gradient-free optimization.
- [Mar 2026] Our preprint on rotative collaborative quadcopter transport is available here.
- [Nov 2025] I am going to be at NeurIPS 2025 in San Diego presenting this paper on RL for relevance scoring for Autonomous Driving.
- [Oct 2025] The director of Autonomy at Zoox talked about my internship work on RL for relevance scoring at ICCV 2025! See the video here.
- [Oct 2025] I am going to be at IROS 2025 in Hangzhou presenting this RA-L paper on multi-agent aerial systems.
- [Oct 2025] Our preprint on LLMs and gradient-free optimization for automatic control synthesis is available here.
- [Sep 2025] The preprint of my internship work on RL for agent prioritization in autonomous driving is available here!
- [Sep 2025] Our preprint on PV panel coating using quadcopters is available here.
- [Jul 2025] I am going to be at ACC 2025 in Denver presenting this paper on LLMs and control.
- [May 2025] I am going to spend the summer at Zoox in the Prediction and Behavior ML division.
- [Mar 2025] Matteo Guarrera and I are finalists for the 2025 Qualcomm Innovation Fellowship!
- [Feb 2025] My paper on the co-design of robust multi-agent aerial systems was accepted for publication on IEEE RA-L.
- [Jan 2025] My paper on synthesizing interpretable control policies with LLMs was accepted for presentation at ACC 2025.
- [Oct 2024] My preprint on synthesizing interpretable control policies with LLMs is available here!
- [Sept 2024] I am an organizer of BARS 2025!
- [Jun 2024] I am going to be part of the KTH RPL Summer School in Stockholm, Sweden!
- [Apr 2024] My work on ReachBot has been published on Science Robotics! Check it out here.
- [Oct 2023] I am going to be at IROS 2023 in Detroit presenting this RA-L paper I worked on during my undergrad.
- [Sep 2023] My preprint on Robust Multi-Agent Aerial Manipulation is available here!
- [Aug 2022] I started my PhD at Berkeley!
|
Research
I am interested in robotics, controls, and computational design. I use methods and ideas from control theory, optimization, meachine learning to develop high performance and robust robots. My current research focuses on the use of foundation models and evolutionary computation for the co-design of robot morphologies and their control policies. Stay tuned!
|
|
Energy-Efficient Collaborative Transport of Tether-Suspended Payloads via Rotating Equilibrium
Eric Foss*, Andrew Tai*, Carlo Bosio*, Mark W. Mueller
arXiv, 2026
arxiv |
abstract |
bibtex
Collaborative aerial transportation of tethered payloads is fundamentally limited by space, power, and weight constraints. Conventional approaches rely on static equilibrium conditions, where each vehicle tilts to generate the forces that ensure they maintain a formation geometry that avoids aerodynamic interactions and collision. This horizontal thrust component represents a significant energy penalty compared to the ideal case in which each vehicle produces purely vertical thrust to lift the payload. Operating in tighter tether configurations can minimize this effect, but at the cost of either having to fly the vehicles in closer proximity, which risks collision, or significantly increasing the length of the tether, which increases complexity and reduces potential use-cases. We propose operating the tether-suspended flying system at a rotating equilibrium. By maintaining steady circular motion, centrifugal forces provide the necessary horizontal tether tension, allowing each quadrotor to generate purely vertical thrust and thus reducing the total force (and power) required compared to an equilibrium where the thrusts are not vertical. It also allows for a wider range of tether configurations to be used without sacrificing efficiency. Results demonstrate that rotating equilibria can reduce power consumption relative to static lifting by up to 20%, making collaborative aerial solutions more practically relevant.
@article{foss2026energy,
title={Energy-Efficient Collaborative Transport of Tether-Suspended Payloads via Rotating Equilibrium},
author={Foss, Eric and Tai, Andrew and Bosio, Carlo and Mueller, Mark W},
journal={arXiv preprint arXiv:2603.06955},
year={2026}
}
Using multiple quadcopters to transport payloads while rotating, reducing power consumption.
|
|
Combining Large Language Models and Gradient-Free Optimization for Automatic Control Policy Synthesis
Carlo Bosio, Matteo Guarrera, Alberto Sangiovanni-Vincentelli, Mark W. Mueller
American Control Conference, 2025
arxiv |
code |
website |
abstract |
bibtex
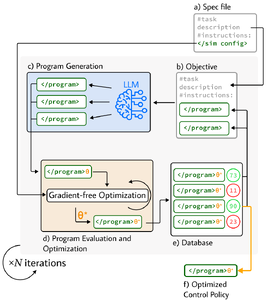
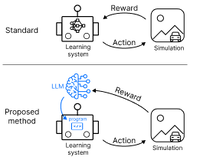
Large Language models (LLMs) have shown promise as generators of symbolic control policies, producing interpretable program-like representations through iterative search. However, these models are not capable of separating the functional structure of a policy from the numerical values it is parametrized by, thus making the search process slow and inefficient. We propose a hybrid approach that decouples structural synthesis from parameter optimization by introducing an additional optimization layer for local parameter search. In our method, the numerical parameters of LLM-generated programs are extracted and optimized numerically to maximize task performance. With this integration, an LLM iterates over the functional structure of programs, while a separate optimization loop is used to find a locally optimal set of parameters accompanying candidate programs. We evaluate our method on a set of control tasks, showing that it achieves higher returns and improved sample efficiency compared to purely LLM-guided search. We show that combining symbolic program synthesis with numerical optimization yields interpretable yet high-performing policies, bridging the gap between language-model-guided design and classical control tuning. Our code is available at https://sites.google.com/berkeley.edu/colmo.
@article{bosio2025combining,
title={Combining Large Language Models and Gradient-Free Optimization for Automatic Control Policy Synthesis},
author={Bosio, Carlo and Guarrera, Matteo and Sangiovanni-Vincentelli, Alberto and Mueller, Mark W},
journal={arXiv preprint arXiv:2510.00373},
year={2025}
}
Using LLMs to generate parametric controllers and numerical optimization to select their optimal parameters.
|

|
RDAR: Reward-Driven Agent Relevance Estimation for Autonomous Driving
Carlo Bosio, Greg Woelki, Noureldin Hendy, Nicholas Roy, Byungsoo Kim
Data@CoRL25 Workshop, Embodied World Models for Decision Making Workshop (NeurIPS), 2025
arxiv |
abstract |
bibtex
Human drivers focus only on a handful of agents at any one time. On the other hand, autonomous driving systems process complex scenes with numerous agents, regardless of whether they are pedestrians on a crosswalk or vehicles parked on the side of the road. While attention mechanisms offer an implicit way to reduce the input to the elements that affect decisions, existing attention mechanisms for capturing agent interactions are quadratic, and generally computationally expensive. We propose RDAR, a strategy to learn per-agent relevance -- how much each agent influences the behavior of the controlled vehicle -- by identifying which agents can be excluded from the input to a pre-trained behavior model. We formulate the masking procedure as a Markov Decision Process where the action consists of a binary mask indicating agent selection. We evaluate RDAR on a large-scale driving dataset, and demonstrate its ability to learn an accurate numerical measure of relevance by achieving comparable driving performance, in terms of overall progress, safety and performance, while processing significantly fewer agents compared to a state of the art behavior model.
@article{bosio2025rdar,
title={RDAR: Reward-Driven Agent Relevance Estimation for Autonomous Driving},
author={Bosio, Carlo and Woelki, Greg and Hendy, Noureldin and Roy, Nicholas and Kim, Byungsoo},
journal={arXiv preprint arXiv:2509.19789},
year={2025}
}
An RL framework to train a scoring model that ranks agents in a driving scene based on their importance for the decision-making process.
|

|
Autonomous Close-Proximity Photovoltaic Panel Coating Using a Quadcopter
Dimitri Jacquemont, Carlo Bosio, Teaya Yang, Ruiqi Zhang, Ozgur Orun, Shuai Li, Reza Alam, Thomas M. Schutzius, Simo A. Makiharju, Mark W. Mueller
arXiv, 2025
arxiv |
abstract |
bibtex
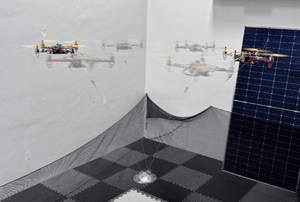
Photovoltaic (PV) panels are becoming increasingly widespread in the domain of renewable energy, and thus, small efficiency gains can have massive effects. Anti-reflective and self-cleaning coatings enhance panel performance but degrade over time, requiring periodic reapplication. Uncrewed Aerial Vehicles (UAVs) offer a flexible and autonomous way to apply protective coatings more often and at lower cost compared to traditional manual coating methods. In this letter, we propose a quadcopter-based system, equipped with a liquid dispersion mechanism, designed to automate such tasks. The localization stack only uses onboard sensors, relying on visual-inertial odometry and the relative position of the PV panel detected with respect to the quadcopter. The control relies on a model-based controller that accounts for the ground effect and the mass decrease of the quadcopter during liquid dispersion. We validate the autonomy capabilities of our system through extensive indoor and outdoor experiments.
@article{jacquemont2025autonomous,
title={Autonomous Close-Proximity Photovoltaic Panel Coating Using a Quadcopter},
author={Jacquemont, Dimitri and Bosio, Carlo and Yang, Teaya and Zhang, Ruiqi and Orun, Ozgur and Li, Shuai and Alam, Reza and Schutzius, Thomas M and Makiharju, Simo A and Mueller, Mark W},
journal={arXiv preprint arXiv:2509.10979},
year={2025}
}
Autonomously coating photovoltaic panels using quadcopters.
|
|
Synthesizing Interpretable Control Policies through Large Language Model Guided Search
Carlo Bosio, Mark W. Mueller
American Control Conference, 2025
paper |
arxiv |
video |
code |
abstract |
bibtex
The combination of Large Language Models (LLMs), systematic evaluation, and evolutionary algorithms has enabled breakthroughs in combinatorial optimization and scientific discovery. We propose to extend this powerful combination to the control of dynamical systems, generating interpretable control policies capable of complex behaviors. With our novel method, we represent control policies as programs in standard languages like Python. We evaluate candidate controllers in simulation and evolve them using a pre-trained LLM. Unlike conventional learning-based control techniques, which rely on black box neural networks to encode control policies, our approach enhances transparency and interpretability. We still take advantage of the power of large AI models, but leverage it at the policy design phase, ensuring that all system components remain interpretable and easily verifiable at runtime. Additionally, the use of standard programming languages makes it straightforward for humans to finetune or adapt the controllers based on their expertise and intuition. We illustrate our method through its application to the synthesis of an interpretable control policy for the pendulum swing-up and the ball in cup tasks. We make the code available at https://github.com/muellerlab/synthesizing_interpretable_control_policies.git
@inproceedings{bosio2025synthesizing,
title={Synthesizing interpretable control policies through large language model guided search},
author={Bosio, Carlo and Mueller, Mark W},
booktitle={2025 American Control Conference (ACC)},
pages={583--590},
year={2025},
organization={IEEE}
}
Encoding control policies as programs in Python and evolving them using LLMs.
|

|
Automated Layout Design and Control of Robust Cooperative Grasped-Load Aerial Transportation Systems
Carlo Bosio, Mark W. Mueller
Robotics and Automation Letters, 2025
paper |
arxiv |
video |
abstract |
bibtex
The co-design of robotic systems, i.e. the joint optimization of physical parameters and controllers, is extremely challenging, due to the difficulties in predicting the effect that changes of physical parameters have on final performances. At the same time, physical and morphological modifications can drastically improve robot capabilities, perhaps completely unlocking new skills and tasks. We present a novel approach to co-optimize the physical layout and the control of a cooperative aerial transportation system. The goal is to achieve the most precise and robust flight when carrying a payload. We assume the agents are connected to the payload through rigid attachments, essentially transforming the whole system into a larger flying object with ''thrust modules'' at the attachment locations of the quadcopters. We investigate the optimal arrangement of the thrust modules around the payload, so that the resulting system achieves the best disturbance rejection capabilities. We choose the H2 norm as a metric of robustness, and propose an algorithm to optimize the layout of the vehicles around the object, and their control altogether. We experimentally validate the effectiveness and benefits of our approach using fleets of three and four quadcopters and payloads of diverse shapes.
@article{bosio2025automated,
title={Automated Layout and Control Co-Design of Robust Multi-UAV Transportation Systems},
author={Bosio, Carlo and Mueller, Mark W},
journal={IEEE Robotics and Automation Letters},
year={2025},
publisher={IEEE}
}
Joint layout-control optimization for robustness of multi-drone aerial manipulation.
|

|
Locomotion as manipulation with ReachBot
Tony G. Chen, Stephanie Newdick, Julia Di, Carlo Bosio, Nitin Ongole, Mathieu Lapôtre, Marco Pavone, Mark R. Cutkosky
Science Robotics, 2024
paper |
arxiv |
abstract |
bibtex
Caves and lava tubes on the Moon and Mars are sites of geological and astrobiological interest but consist of terrain that is inaccessible with traditional robot locomotion. To support the exploration of these sites, we present ReachBot, a robot that uses extendable booms as appendages to manipulate itself with respect to irregular rock surfaces. The booms terminate in grippers equipped with microspines and provide ReachBot with a large workspace, allowing it to achieve force closure in enclosed spaces, such as the walls of a lava tube. To propel ReachBot, we present a contact-before-motion planner for nongaited legged locomotion that uses internal force control, similar to a multifingered hand, to keep its long, slender booms in tension. Motion planning also depends on finding and executing secure grips on rock features. We used a Monte Carlo simulation to inform gripper design and predict grasp strength and variability. In addition, we used a two-step perception system to identify possible grasp locations. To validate our approach and mechanisms under realistic conditions, we deployed a single ReachBot arm and gripper in a lava tube in the Mojave Desert. The field test confirmed that ReachBot will find many targets for secure grasps with the proposed kinematic design.
@article{chen2024locomotion,
title={Locomotion as manipulation with ReachBot},
author={Chen, Tony G and Newdick, Stephanie and Di, Julia and Bosio, Carlo and Ongole, Nitin and Lap{\^o}tre, Mathieu and Pavone, Marco and Cutkosky, Mark R},
journal={Science Robotics},
volume={9},
number={89},
pages={eadi9762},
year={2024},
publisher={American Association for the Advancement of Science}
}
A novel concept of rock climbing robot for Mars lava tube exploration.
|
Design and source code can be found here.
|
|